遥控车电路板
遥控车电路板设计要点
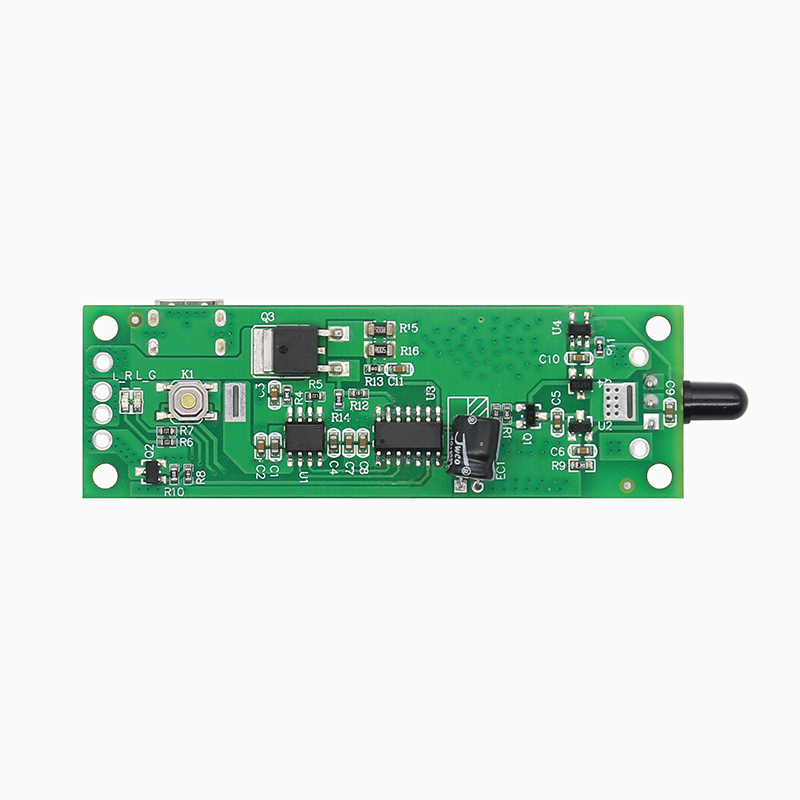
遥控车电路板的设计需围绕信号稳定性、动力高效驱动、功能集成以及可靠性展开。在无线通信与抗干扰设计上,为确保遥控器与遥控车之间的稳定连接,需选用高性能的无线收发芯片,支持常见的 2.4GHz 等频段通信。优化天线设计与布局,提高信号接收灵敏度与发射强度,减少信号传输延迟与丢包率。同时,通过屏蔽罩、滤波电路等手段,增强电路板的抗干扰能力,抵御外界电磁干扰,保证在复杂电磁环境下,如多个遥控车同时运行的场景中,也能精准接收并执行遥控器指令。
动力驱动与速度控制设计关乎遥控车的运动性能。采用适配电机特性的驱动芯片,结合 PWM(脉宽调制)技术,实现对电机转速的精准调节。通过合理设计驱动电路,可满足遥控车前进、后退、加速、减速等不同运动状态需求。例如,在高速行驶时提供稳定大电流驱动,在低速转向时实现细腻的转速控制。同时,考虑电机的启动电流冲击,设置软启动电路,避免过大电流对电路板元件造成损害,延长电机与电路板的使用寿命。
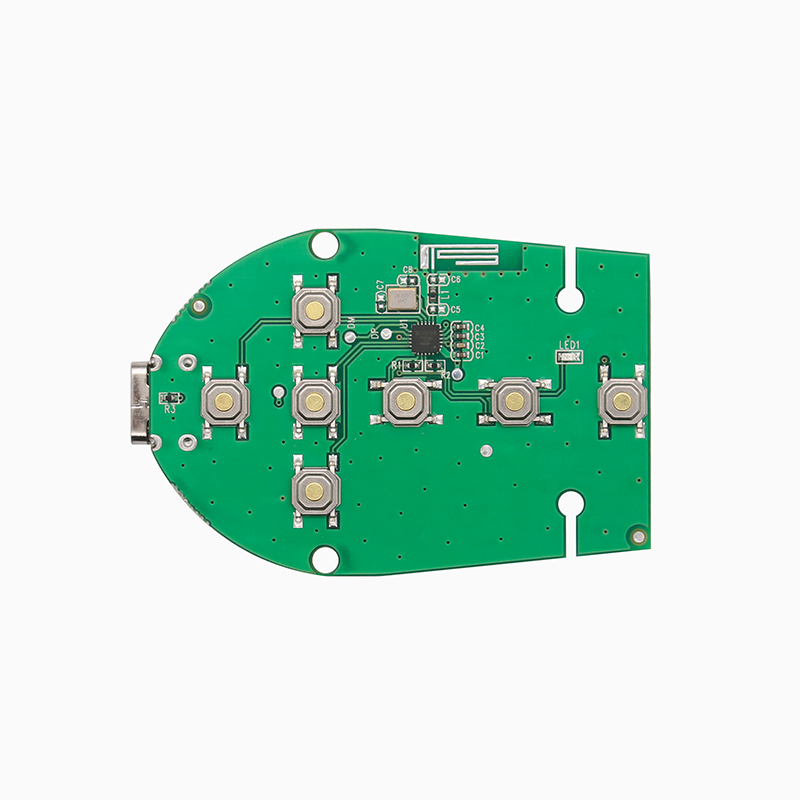
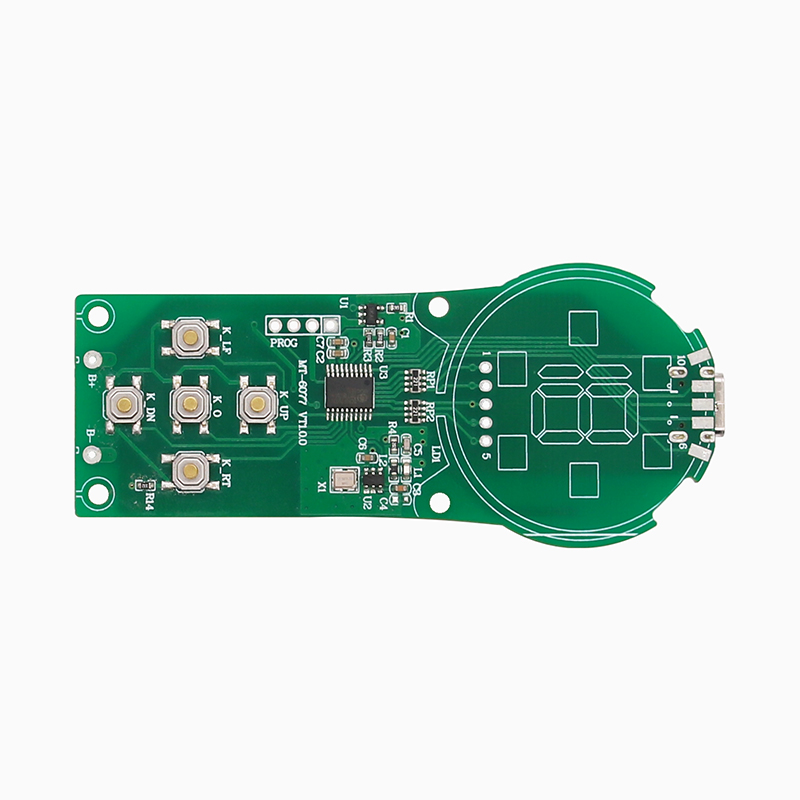
多功能集成设计满足用户多样化需求。除基础的行驶控制功能外,遥控车电路板还需集成转向控制、灯光效果、音效反馈等功能。转向控制通过舵机驱动电路实现,主控芯片根据遥控器的转向指令,精确控制舵机转动角度,实现遥控车灵活转向。灯光效果部分,可通过 LED 驱动电路控制车灯的亮灭、闪烁,增强视觉效果与夜间行驶安全性;音效模块则在遥控车启动、加速、碰撞等场景下播放相应音效,提升娱乐体验。此外,部分高端遥控车还具备姿态感应、自平衡控制等功能,这要求电路板集成加速度计、陀螺仪等传感器,并编写复杂算法进行数据处理与控制。
可靠性与稳定性设计针对遥控车复杂的使用环境。遥控车在行驶过程中会面临震动、碰撞、颠簸,以及不同温度、湿度条件。在元件选型上,选用抗冲击、耐震动的工业级电子元件,确保元件在剧烈震动下不易松动、损坏。优化电路板布局,采用多层板设计,合理规划电源层与地层,减少信号干扰,提高电路稳定性。同时,设置过流、过压、过热保护电路,当电机堵转导致电流过大,或电池电压异常时,保护电路迅速切断电源,防止电路板与电机受损。对电路板进行加固处理,如使用胶封固定关键元件,增强整体结构强度。
遥控车电路板组成元件
主控芯片是遥控车电路板的核心,通常采用高性能的微控制器(MCU)。其集成了中央处理器(CPU)、存储器、定时器与多种通信接口。CPU 负责执行预设程序,对接收到的遥控器信号进行解析处理,根据指令控制动力驱动、转向、灯光等功能模块的工作状态。存储器用于存储程序代码、车辆参数设置(如速度限制、转向灵敏度)等信息。定时器为 PWM 信号生成、功能切换计时等提供精确时间基准。通信接口实现与无线收发芯片的数据交互,接收遥控器指令并反馈车辆状态信息。此外,主控芯片还负责处理传感器数据(如有),实现更智能的控制功能。
无线收发芯片是实现遥控器与遥控车通信的关键元件。它将遥控器发出的控制信号进行调制、编码后发射出去,同时接收遥控车反馈的状态信号并进行解调、解码。常见的 2.4GHz 无线收发芯片具有传输距离远、抗干扰能力强、功耗低等特点,可实现稳定的双向通信。无线收发芯片与天线配合工作,天线的性能直接影响信号传输质量,合理设计天线的形状、尺寸与安装位置,能有效扩大遥控范围,减少信号盲区。
电机驱动芯片负责将电源电能转换为适合电机工作的电流与电压,驱动电机运转。根据遥控车电机类型(如直流电机、无刷电机),选用相应的驱动芯片。对于直流电机,驱动芯片通过控制电流方向与大小,实现电机的正反转与转速调节;对于无刷电机,驱动芯片需按照特定的换相逻辑,依次驱动电机的各个绕组,实现电机转动。电机驱动芯片还集成过流、过压、过热保护功能,当电机出现堵转、短路等异常情况时,自动切断驱动信号,保护电机与电路板。
舵机驱动电路用于控制遥控车的转向系统。舵机是一种位置伺服的驱动器,能根据输入信号精确控制转动角度。舵机驱动电路接收主控芯片的控制信号,将其转换为适合舵机工作的驱动信号,控制舵机转动到指定角度,从而实现遥控车的转向操作。通过调节驱动信号的占空比,可精确控制舵机的转动角度与速度,确保遥控车转向精准、响应灵敏。
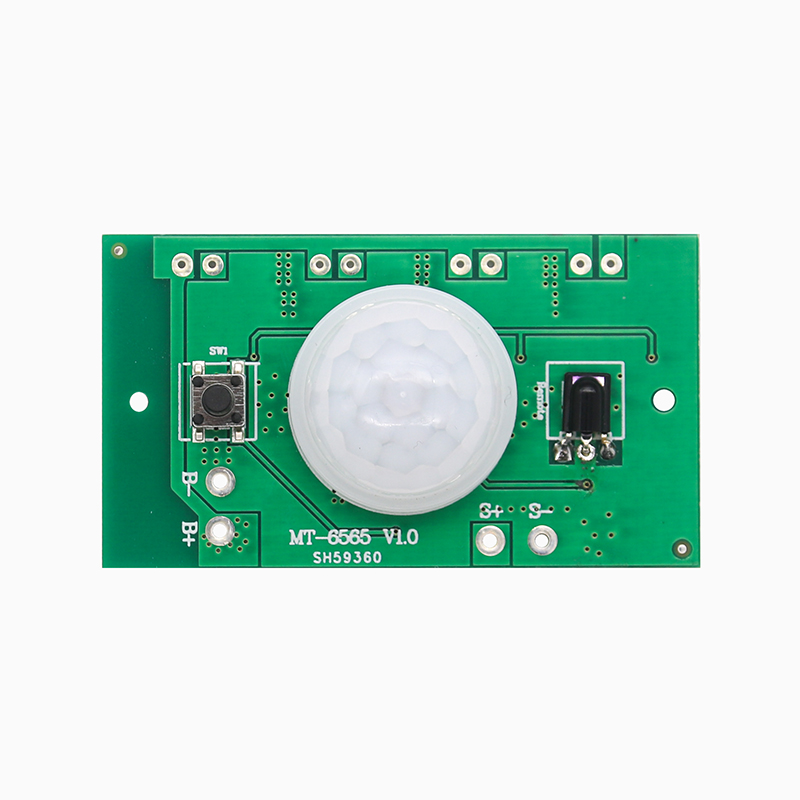
传感器元件为遥控车提供更智能的控制与反馈功能。加速度计与陀螺仪可感知遥控车的姿态与运动状态,用于实现自平衡控制、防翻倒功能,或为用户提供车辆运动数据反馈。红外传感器、超声波传感器等可用于检测障碍物,实现自动避障功能。这些传感器将采集到的物理信号转换为电信号,传输至主控芯片,主控芯片根据预设程序进行分析处理,输出相应控制指令,调整遥控车的运动状态。
电源管理模块为电路板各元件提供稳定电力供应,并实现电能高效管理。遥控车通常采用锂电池或镍氢电池供电,电源管理模块对电池电压进行转换与稳压处理,为不同元件提供合适工作电压,如为主控芯片提供 3.3V 电压,为电机驱动芯片提供更高的工作电压。同时,具备电池电量监测功能,实时检测电池电压,当电量低于设定阈值时,向主控芯片发送低电量信号,主控芯片可控制遥控车发出提示音或降低性能,提醒用户及时充电。此外,电源管理模块还包含过流、过压保护电路,保障电路安全。
遥控车电路板工作原理
当遥控车开启电源后,电源管理模块首先启动,对电池电压进行检测与转换,为主控芯片、无线收发芯片、电机驱动芯片等提供稳定工作电压。主控芯片在获得稳定电源后,进入初始化阶段,加载内部存储的程序代码与参数配置,对自身及连接的各功能模块进行自检,确保系统正常运行。此时,无线收发芯片开始工作,建立与遥控器之间的无线通信连接。
用户操作遥控器时,遥控器内部的无线发射芯片将按键操作信号进行编码、调制后,通过天线发射出去。遥控车端的无线收发芯片接收信号,进行解调、解码处理,将解析后的指令传输至主控芯片。主控芯片对接收到的指令进行分析,判断用户操作意图,如前进、后退、左转、右转等。
若为前进指令,主控芯片根据预设的速度参数,通过定时器生成相应占空比的 PWM 信号,发送至电机驱动芯片。电机驱动芯片根据 PWM 信号调节输出电流大小与方向,驱动电机正向转动,带动遥控车前进。同时,主控芯片可根据需求调整 PWM 信号占空比,实现加速或减速控制。当接收到后退指令时,电机驱动芯片改变电流方向,使电机反转,遥控车后退。
转向操作时,主控芯片根据转向指令,计算出所需的舵机转动角度,向舵机驱动电路发送控制信号。舵机驱动电路将信号转换为适合舵机工作的驱动信号,控制舵机转动到指定角度,通过转向连杆机构带动车轮转向,实现遥控车的转向功能。在转向过程中,主控芯片可根据实际情况微调舵机角度,确保转向精准。
若遥控车配备传感器,传感器实时采集车辆姿态、周围环境等数据,并将数据转换为电信号传输至主控芯片。例如,当加速度计与陀螺仪检测到车辆姿态异常,可能发生翻倒时,主控芯片迅速调整电机转速与转向,尝试恢复车辆平衡;当红外传感器或超声波传感器检测到前方障碍物时,主控芯片根据距离信息,控制电机减速或转向,实现自动避障。
在整个运行过程中,电源管理模块持续监测电池电量。当电量低于设定阈值时,向主控芯片发送低电量信号,主控芯片控制遥控车发出提示音,同时可降低电机驱动功率,限制车辆速度,延长电池使用时间,提醒用户及时充电。此外,若电路中出现过流、过压等异常情况,保护电路迅速动作,切断电源,防止元件损坏。余姚市铭迪电器科技有限公司在遥控车电路板制造过程中,严格遵循电子产品生产标准,从电路设计优化、元件精密焊接到成品全面检测,运用专业设备与技术手段,保障每一块电路板性能稳定可靠,为遥控车的顺畅运行提供坚实支撑。
遥控车电路板常见故障及维修
遥控车电路板常见故障包括无法遥控、行驶异常、转向失灵、无灯光音效等。无法遥控故障时,首先检查遥控器与遥控车的电源是否正常,电池电量是否充足,重新安装电池并确保连接良好。若电源正常,检查遥控器与遥控车的无线通信频率是否匹配,尝试重新对码。若对码失败,使用专业设备检测无线收发芯片的工作状态,测量芯片供电电压是否正常,检查天线连接是否松动、损坏,更换故障元件。若无线收发芯片工作正常,检查主控芯片与无线收发芯片之间的通信线路是否断路、短路,修复线路或重新焊接焊点。
行驶异常表现为电机不转、转速不稳定或无法变速。电机不转时,检查电机驱动芯片是否有输出电压,若有输出,可能是电机损坏,使用万用表测量电机绕组电阻,判断电机是否断路,更换损坏电机;若电机驱动芯片无输出电压,检查主控芯片是否输出控制信号,可通过示波器检测主控芯片相关引脚信号,若信号正常,可能是电机驱动芯片故障,更换芯片;若主控芯片无信号输出,检查主控芯片程序是否出错,尝试重新烧录程序,若仍无法解决,可能是主控芯片硬件损坏,更换主控芯片。转速不稳定或无法变速,可能是 PWM 信号异常,检查主控芯片定时器工作是否正常,电机驱动芯片外围电路元件是否损坏,修复或更换故障元件。
转向失灵故障时,检查舵机是否正常工作,手动转动舵机,感受其阻力是否正常,若舵机卡死或无阻力,可能是舵机内部齿轮损坏或电机故障,更换舵机。若舵机正常,检查舵机驱动电路是否有输出信号,使用示波器检测驱动电路输出引脚信号,若信号异常,检查驱动电路元件是否损坏,如驱动芯片、电阻、电容等,更换故障元件。若舵机驱动电路信号正常,检查主控芯片与舵机驱动电路之间的连接线路是否断路、短路,修复线路问题。
无灯光音效故障,先检查灯光、音效模块的电源是否正常,使用万用表测量供电电压是否达到工作要求。若电源正常,检查 LED 灯是否损坏,使用万用表二极管档测量 LED 灯珠正反向电阻,判断灯珠是否开路,更换损坏灯珠;检查音效模块的扬声器是否损坏,测量扬声器电阻,若电阻异常,更换扬声器。若硬件正常,检查主控芯片是否输出控制信号,可通过示波器检测相关引脚信号,若信号异常,检查主控芯片程序是否出错,重新烧录程序或检查灯光、音效驱动电路是否故障,修复或更换损坏元件。
- 2025-05-13
- 2025-05-13
- 2025-05-13
- 2025-05-13
- 2025-05-12
- 2025-05-12
- 2025-05-10
- 2025-05-10
- 2025-05-10
- 2025-05-10
- 2025-05-10
- 2025-05-10
- 2025-05-09
- 2025-05-09
- 2025-05-09
- 2025-05-08
- 2025-05-08
- 2025-05-08
- 2025-05-07
- 2025-05-07
- 2025-05-07
- 2025-05-07
- 2025-05-07
- 2025-05-07
- 2025-05-06